Autonomía en movimiento: perspectivas y desafíos de los vehículos autónomos

¿Qué constituye un vehículo autónomo? En términos precisos, se trata de un vehículo capaz de llevar a cabo un trayecto completo, desde su punto de partida hasta un destino predefinido, sin necesidad de intervención humana. Cualquier instancia que requiera una acción por parte del conductor indicaría que la autonomía del vehículo es restringida. Estas restricciones se clasifican en seis niveles de conducción autónoma, que se explicarán más adelante.
La historia del desarrollo de los vehículos de conducción autónoma podría remontarse al vehículo de tres ruedas ideado por Leonardo Da Vinci en el siglo XVI, pero el avance significativo se produjo a finales del siglo XX y principios del siglo XXI. Ernst Dickmanns es ampliamente reconocido como el pionero en este campo, siendo el primero en lograr avances notables. En la década de 1980, el ingeniero Dickmanns lideró un equipo de científicos en la compañía Mercedes-Benz, donde lograron equipar una furgoneta de la marca para recorrer cientos de kilómetros de manera autónoma, marcando un hito en la historia de los vehículos autónomos.
Durante la década de 1990 se produjeron numerosos avances en la investigación y desarrollo de vehículos autónomos. Uno de los hitos más destacados fue el Proyecto ARGO, llevado a cabo por la Universidad de Parma bajo la dirección del profesor Alberto Broggi, quien lideró un equipo que instrumentó un Lancia Thema para recorrer más de 1.900 kilómetros de forma autónoma en el norte de Italia. En los años 2000, la agencia DARPA (Agencia de Proyectos de Investigación Avanzada de Defensa, del Departamento de Defensa de los Estados Unidos) lanzó los Grand Challenge, competiciones de vehículos autónomos en diferentes lugares del estado de California, como el desierto de Mojave. Los equipos participantes tenían la oportunidad de ganar sumas significativas de dinero si lograban liderar la competencia. Uno de los ganadores en 2005 fue el equipo dirigido por Sebastian Trun, entonces director del Laboratorio de Inteligencia Artificial de la Universidad de Stanford, con su vehículo Stanley, una Volkswagen Touareg totalmente autónoma desarrollada en dicho laboratorio.
En los últimos años, los avances tecnológicos han permitido que un mayor número de empresas y grupos de investigación desarrollen prototipos, pruebas de concepto y productos relacionados con los vehículos autónomos. El aumento de la capacidad computacional, ya sea a través de microprocesadores más potentes o del acceso a tarjetas gráficas para la computación paralela, ha sido fundamental en este progreso. Actualmente numerosas compañías, tanto las establecidas en el mercado automotriz como Daimler, Volkswagen y Volvo, como más recientes como Tesla, Waymo (una subsidiaria de Google) y Uber, están centradas en el desarrollo de esta tecnología.
La seguridad vial es la principal motivación detrás de este desarrollo. Con el crecimiento del número de vehículos en circulación en todo el mundo, se hace cada vez más necesario controlar el tránsito para reducir los accidentes y prevenir fatalidades. Sin embargo, el desarrollo de los vehículos autónomos plantea desafíos más allá de la tecnología, como la preservación de datos, su legislación y la mitigación del impacto ambiental.
En este contexto, los consumidores muestran un gran interés en delegar la conducción de sus vehículos a la tecnología. Esto ha llevado a los fabricantes de automóviles, en colaboración con empresas especializadas, a mejorar los sistemas avanzados de asistencia al conductor (conocidos como ADAS, por sus siglas en inglés) y ofrecer otras opciones de automatización, hasta que los vehículos sean completamente autónomos. Se proyecta que para el año 2035 los ADAS y la conducción automatizada podrían impulsar un mercado multimillonario dentro del sector automotriz.
Funcionamiento de un vehículo autónomo
Los vehículos autónomos poseen una capacidad adicional en comparación con los vehículos convencionales: tienen la posibilidad de percibir el entorno utilizando tres sentidos extras: radar, cámaras y LiDar –basado en láser– (acrónimo de Detección y Alcance de Luz). Estos sensores actúan como “ojos electrónicos”, permitiendo al vehículo observar todo su entorno con gran precisión. Cada uno de estos elementos proporciona información a un sistema inteligente compuesto principalmente por algoritmos que trabajan en conjunto con modelos de inteligencia artificial (IA), donde cada uno de ellos ha sido entrenado para diferentes propósitos como la detección de las distintas señales de tránsito, marcas viales en las calles o rutas, identificar el estado de los semáforos o determinar el número y tipo de vehículos presentes en un área determinada, así como la presencia de peatones en las cercanías del vehículo. Cada una de estas tareas es fundamental, ya que implican resolver situaciones complejas.
Para comprender la complejidad de esta tarea se puede imaginar cómo un algoritmo debe identificar correctamente señales de límite de velocidad o señales de PARE a partir de una o varias imágenes. A continuación, se presentan ejemplos de diferentes señales de límites de velocidad, mostrando la variabilidad en sus diseños y formatos, lo que dificulta la identificación precisa de una señal. Además, factores como la iluminación (por ejemplo, si la conducción es realizada de día o de noche), obstáculos (como ramas de árboles u otros vehículos obstruyendo los carteles de señalización) o el deterioro de las señales de tránsito pueden complicar aún más esta tarea.
Figura 1. Diferentes formas y tamaños de señales de límite de velocidad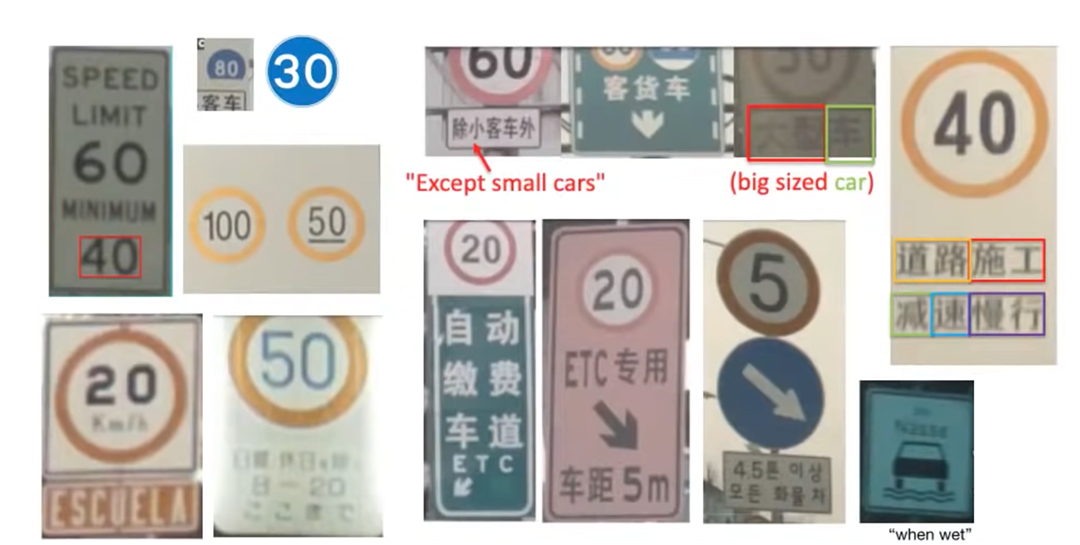
Crédito: Andrej Karpathy, Tesla.
A estas funciones de detección de señales de tránsito se les suman tareas aún más complejas, como la identificación de peatones o ciclistas, otros vehículos y la evaluación de situaciones de riesgo en un tiempo muy corto. El sistema inteligente analiza todas estas tareas en tiempo real para la toma de las decisiones necesarias y envía comandos al sistema mecánico y eléctrico del vehículo, controlando los actuadores como el acelerador, los frenos y la dirección.
Es evidente que las tecnologías de conducción autónoma contribuyen a mejorar la seguridad, aunque no son infalibles al 100%, ya que su efectividad puede verse afectada por factores externos que dificultan la interpretación del entorno por parte de los sensores, o incluso por limitaciones intrínsecas para percibir el entorno del vehículo.
Según la definición de la SAE, antes conocida como la Sociedad de Ingenieros Automotrices, existen seis niveles de conducción automatizada, que van desde el control total del vehículo por parte de un conductor humano, asistido por tecnología avanzada de seguridad, hasta un vehículo que puede operar sin intervención humana. Solo el nivel superior representa un vehículo completamente autónomo sin conductor. En la siguiente tabla se detallan las características correspondientes a cada nivel de conducción autónoma.
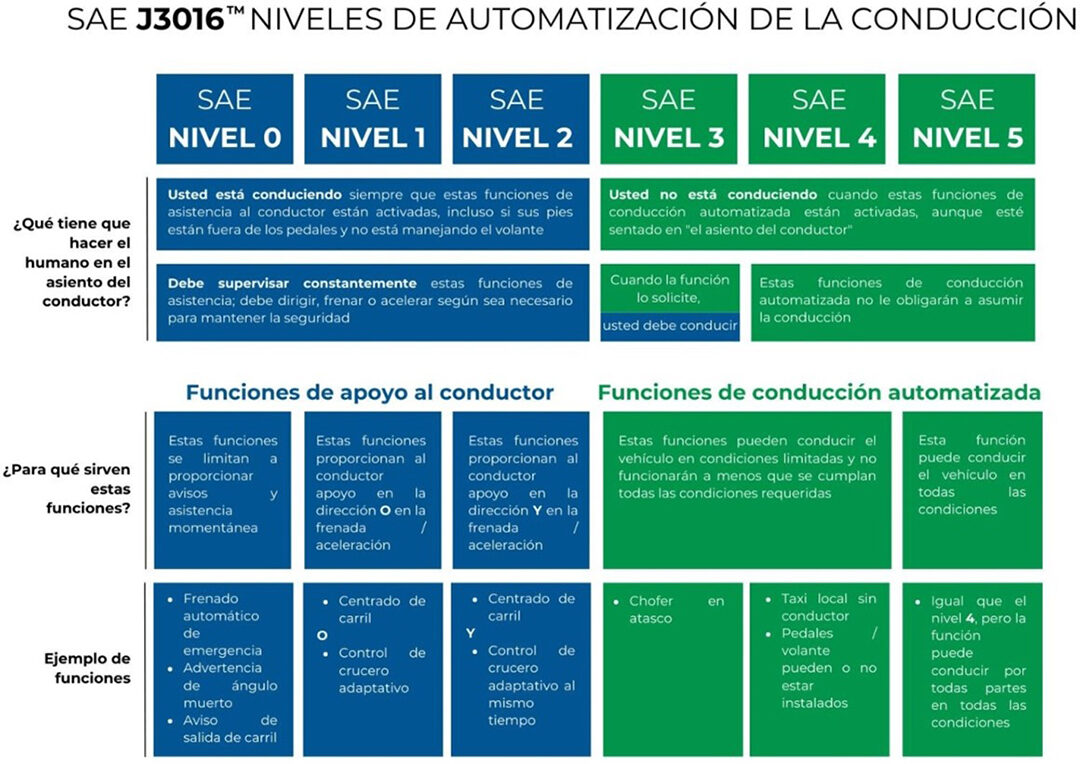
Derechos reservados a SAE International (traducción realizada por Easy Law Magazine).
Ventajas y desafíos
La prevención de accidentes, tanto en el tránsito diario como en las rutas de larga distancia, se destaca como la principal motivación detrás de la tecnología de conducción automatizada. Las estadísticas alarmantes de fatalidades relacionadas con accidentes de tránsito en todo el mundo refuerzan la necesidad de buscar soluciones que minimicen estos riesgos. Los vehículos autónomos representan una innovación significativa al eliminar el factor humano, que puede verse afectado por la somnolencia, distracciones o falta de experiencia al volante, lo que contribuye de manera considerable a reducir la incidencia de accidentes.
Estos vehículos presentan diversas ventajas sobre los convencionales, incluyendo la accesibilidad a la movilidad, la eficiencia en términos de costos y la capacidad para mitigar las congestiones en el tráfico mediante el intercambio de datos con otros vehículos para anticipar el estado del tránsito. Además, representan una alternativa crucial para brindar movilidad a personas que, debido a su edad, discapacidad o falta de acceso al transporte público convencional, se ven impedidos para conducir.
En el caso de los vehículos de conducción autónoma que operan en niveles del 0 al 2 (con intervención humana durante el manejo), así como en algunos modelos de automóviles convencionales, se han incorporado sistemas avanzados de asistencia al conductor (ADAS), lo que resulta en una mejora considerable en la seguridad vial. Estos sistemas brindan un monitoreo constante del conductor para evitar la somnolencia o las distracciones, así como también ofrecen información sobre puntos ciegos del vehículo, lo que ayuda a anticipar peligros inminentes. De acuerdo con el National Safety Council (organización norteamericana que promueve la salud y seguridad vial) podría llegar a prevenir hasta un 60% del total de las fatalidades en accidentes de tránsito.
Además, a medida que el transporte de conducción automatizada se adopte más ampliamente, tanto en vehículos particulares como en el transporte público, se vislumbran beneficios significativos en términos del impacto medioambiental. Esta perspectiva se fundamenta en la mayor eficiencia de la conducción autónoma, la cual conlleva a una reducción en el número de vehículos en circulación, lo que a su vez disminuirá la energía requerida. Según un estudio realizado por la Universidad de Michigan, este cambio podría reducir el impacto medioambiental hasta en un 9 por ciento.
Estos beneficios tienen asociados una serie de desafíos importantes que van desde el costo de desarrollar esta tecnología, la madurez de la misma y su correspondiente regulación.
El desarrollo de la tecnología de conducción autónoma conlleva costos significativos, como lo ilustra el caso del Proyecto Titán de Apple, el cual fue cancelado tras una inversión multimillonaria. Inicialmente, Apple había anunciado la creación de un vehículo autónomo de nivel 5 de automatización, pero posteriormente redujo sus objetivos hasta alcanzar el nivel 2, antes de abandonar el proyecto por completo. Esta decisión se fundamenta principalmente en la complejidad inherente de replicar el pensamiento, la lógica y los instintos humanos al tomar decisiones críticas, a pesar de los avances en la funcionalidad de la tecnología. La ocurrencia de accidentes en California relacionados con vehículos de Tesla y los servicios de robot taxis de Cruise y Uber ha contribuido a generar cierta desconfianza en la comunidad y el mercado respecto de la fiabilidad de esta tecnología.
Por otro lado, una de las cuestiones más relevantes que subyace en la conducción de un vehículo autónomo. Como se mencionó previamente, el vehículo es controlado por un sistema inteligente compuesto por varios modelos de inteligencia artificial (IA) que toman decisiones y actúan sobre otros componentes. Sin embargo, estos modelos se basan principalmente en los datos utilizados durante su entrenamiento. Como resultado, todavía existen modelos que no pueden identificar adecuadamente a personas con diferentes tonos de piel debido a la falta de diversidad en los datos de entrenamiento. Esta deficiencia podría tener consecuencias significativas en la toma de decisiones en situaciones críticas.
Estos modelos de IA analizan la escena y determinan cómo enfrentar los obstáculos, basándose en suposiciones derivadas de una base de datos de imágenes etiquetadas. Estas etiquetas categorizan elementos como “automóvil”, “peatón” o “árbol”, las cuales se utilizan durante el entrenamiento de los modelos. Sin embargo, no todas las situaciones se pueden prever y modelar, lo que hace que los múltiples modos de falla sean extremadamente difíciles de predecir. Incluso manteniendo todas las variables constantes, un vehículo autónomo puede reaccionar de manera muy diferente en el mismo tramo de ruta en diferentes momentos del día, posiblemente debido a variaciones en los ángulos de la luz del sol.
Por otro lado, como efecto colateral, estos vehículos recopilan grandes volúmenes de datos, incluidas imágenes de peatones, sin obtener el consentimiento ni del peatón ni del propietario del vehículo. Actualmente, no existen regulaciones claras sobre la cantidad de datos que pueden recopilarse, quién puede acceder a ellos o cómo deben ser distribuidos y almacenados. En esencia, estos datos son utilizables para una amplia gama de propósitos que podrían comprometer la privacidad de las personas. Además, el hecho de que estas imágenes puedan transmitirse de forma inalámbrica también plantea preocupaciones éticas adicionales.
No obstante, quizás el tema ético más controversial es la toma de decisiones de un vehículo autónomo en situaciones donde está en juego la vida de seres humanos, evaluando riesgos y ajustando las operaciones para minimizar daños, lesiones y muertes. Además, surge el interrogante sobre la responsabilidad en caso de que un vehículo autónomo esté involucrado en un accidente. Esta pregunta ha persistido durante años en la comunidad sin una respuesta clara. La falta de regulación en el ámbito de la inteligencia artificial en vehículos autónomos avanza a paso lento, en parte debido a la falta de competencia técnica en los organismos reguladores para supervisar eficazmente tecnologías avanzadas, especialmente aquellas relacionadas con la inteligencia artificial, que evolucionan rápidamente.
La Unión Europea ha tomado una postura más proactiva en la regulación de la inteligencia artificial en general, así como en los vehículos autónomos en particular, y ha emitido la primera ley integral de inteligencia artificial en el mundo, que entrará en vigencia en 2026. En nuestro país, si bien existen numerosos proyectos en marcha, el debate aún no ha comenzado en el poder legislativo.
El futuro de los vehículos autónomos
Actualmente, el nivel más avanzado de conducción autónoma disponible para los consumidores se encuentra en el nivel 2, disponible en modelos como Super Cruise de GM, BlueCruise de Ford Motor Co. y Full Self Driving de Tesla. Sin embargo, también hay varias empresas dedicadas a la fabricación y operación de vehículos autónomos para servicios y fines comerciales.
En este ámbito, se destaca Waymo como una de las compañías más exitosas en la actualidad. Esta compañía opera un servicio de taxis robóticos en San Francisco, California, y está ampliando sus servicios en Los Ángeles, California, y Austin, Texas. Además, encontramos camiones autónomos como los operados por Gatik, encargados de la entrega de mercancías desde puntos de distribución hasta puntos de venta. En la misma línea, empresas como Kodiak Robotics realizan rutas de largo y corto recorrido para compañías como Kroger e Ikea.
Existe un notable interés por parte de los consumidores en los vehículos autónomos, incluso aquellos de Nivel L2 (que utilizan sistemas LiDAR) que contienen componentes con costos aproximados entre 1.500 y 2.000 dólares, los cuales se incrementan aún más para los automóviles con opciones de nivel L3 y L4. Según un análisis de McKinsey, que se fundamenta principalmente en el interés de los consumidores en los vehículos autónomos y las soluciones comerciales disponibles en la actualidad, como los sistemas ADAS, se estima que el mercado automotriz para pasajeros podría alcanzar entre 300.000 y 400.000 millones de dólares para el año 2035.
Por otro lado, para los fabricantes de automóviles que se centran en ofrecer vehículos con niveles más altos de automatización, existe un enorme potencial de crecimiento. El interés de los conductores en ceder el control al sistema autónomo durante la conducción está en aumento, lo que implica la adopción de sistemas más avanzados, incluidos los niveles L2, L3 y L4. Simultáneamente, los costos de sensores y sistemas de cómputo de alto rendimiento están disminuyendo, mientras que los estándares de seguridad, como el NCAP en Europa (Programa de Evaluación de Automóviles Nuevos) o la NHTSA en Estados Unidos (Administración Nacional de Seguridad del Tráfico en las Carreteras) están en constante aumento.
En conjunto, estos factores impulsan significativamente a la industria automotriz, lo que podría llevar, con el tiempo, a la incorporación de funcionalidades más avanzadas de conducción autónoma. Según un estudio de ventas de McKinsey, es probable que los sistemas L3 y L4 para la conducción en autopistas estén disponibles en el segmento de automóviles de pasajeros alrededor de 2025 en Europa y América del Norte. Sin embargo, los altos costos iniciales de desarrollo de estos sistemas de conducción sugieren que podrían estar inicialmente limitados a segmentos de vehículos premium.
Ahora bien, como se mencionó anteriormente, es esencial que las agencias reguladoras encargadas de supervisar esta tecnología, tanto en inteligencia artificial en general como en conducción autónoma en particular, puedan dar los pasos necesarios para crear un ecosistema confiable y seguro, así como implementar estándares globales.
En conclusión, queda claro que las nuevas tecnologías de conducción autónoma tienen un tremendo potencial para brindar niveles inéditos de seguridad y comodidad a los consumidores, así como para generar un valor significativo dentro de la industria automotriz, transformando fundamentalmente la forma en que las personas viajan. No obstante, el mercado de vehículos autónomos es sumamente dinámico y conlleva un alto nivel de incertidumbre. Por consiguiente, las empresas involucradas en la cadena de producción de vehículos autónomos deben contar con estrategias bien definidas y alineadas.
Finalmente, para triunfar en el mercado automotriz en los próximos años, las empresas necesitan tener una visión clara, un profundo entendimiento del mercado y una sólida comprensión de los intereses de los consumidores.